
ਜਿੰਬਲ ਇੱਕ ਖਾਸ ਪਹੀਏ ਦਾ ਡਿਜ਼ਾਈਨ ਹੈ ਜੋ ਕਈ ਦਿਸ਼ਾਵਾਂ ਵਿੱਚ ਸੁਤੰਤਰ ਰੂਪ ਵਿੱਚ ਘੁੰਮ ਸਕਦਾ ਹੈ, ਜਿਸ ਨਾਲ ਇੱਕ ਵਾਹਨ ਜਾਂ ਰੋਬੋਟ ਕਈ ਤਰ੍ਹਾਂ ਦੇ ਕੋਣਾਂ ਅਤੇ ਦਿਸ਼ਾਵਾਂ ਵਿੱਚ ਘੁੰਮ ਸਕਦਾ ਹੈ। ਇਸ ਵਿੱਚ ਵਿਸ਼ੇਸ਼ ਤੌਰ 'ਤੇ ਬਣਾਏ ਗਏ ਪਹੀਆਂ ਦੀ ਇੱਕ ਲੜੀ ਹੁੰਦੀ ਹੈ, ਆਮ ਤੌਰ 'ਤੇ ਹਰੇਕ ਪਹੀਏ 'ਤੇ ਵਿਸ਼ੇਸ਼ ਰੋਲਿੰਗ ਵਿਧੀ ਹੁੰਦੀ ਹੈ।

ਆਮ ਤੌਰ 'ਤੇ, ਇੱਕ ਯੂਨੀਵਰਸਲ ਪਹੀਏ ਦਾ ਉਤਪਾਦਨ ਸਿਧਾਂਤ ਦੋ ਮੁੱਖ ਤੱਤਾਂ 'ਤੇ ਅਧਾਰਤ ਹੁੰਦਾ ਹੈ: ਘੁੰਮਣਾ ਅਤੇ ਘੁੰਮਣਾ। ਇੱਥੇ ਇੱਕ ਆਮ ਨਿਰਮਾਣ ਸਿਧਾਂਤ ਹੈ:
ਪਹੀਏ ਦੀ ਉਸਾਰੀ: ਇੱਕ ਯੂਨੀਵਰਸਲ ਪਹੀਏ ਵਿੱਚ ਆਮ ਤੌਰ 'ਤੇ ਇੱਕ ਬੌਬਿਨ ਅਤੇ ਪਹੀਆ ਹੁੰਦਾ ਹੈ। ਬੌਬ ਬੌਬ ਦੇ ਅਧਾਰ ਨਾਲ ਜੁੜਿਆ ਹੁੰਦਾ ਹੈ, ਜਦੋਂ ਕਿ ਪਹੀਆ ਇੱਕ ਕੇਂਦਰੀ ਧੁਰੀ ਦੁਆਲੇ ਸੁਤੰਤਰ ਰੂਪ ਵਿੱਚ ਘੁੰਮਦਾ ਹੈ।
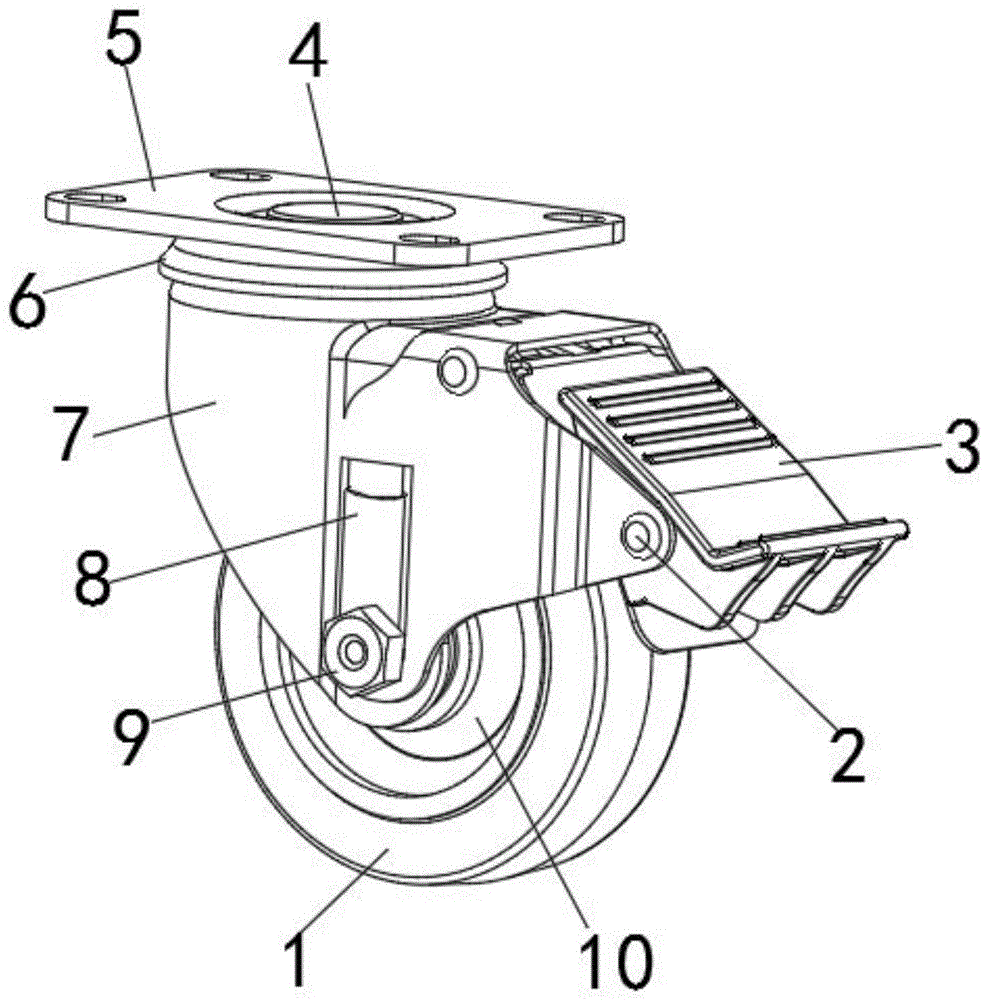
ਰੋਲਿੰਗ ਡਿਵਾਈਸ: ਵੇਵਪਲੇਟਾਂ ਵਿੱਚ ਆਮ ਤੌਰ 'ਤੇ ਪਹੀਆਂ ਅਤੇ ਉਹਨਾਂ ਦੇ ਵਿਚਕਾਰ ਕੁਝ ਖਾਸ ਰੋਲਿੰਗ ਡਿਵਾਈਸ ਹੁੰਦੇ ਹਨ, ਜਿਵੇਂ ਕਿ ਗੇਂਦਾਂ ਜਾਂ ਰੋਲਰ। ਇਹ ਡਿਵਾਈਸ ਪਹੀਆਂ ਨੂੰ ਕਈ ਦਿਸ਼ਾਵਾਂ ਅਤੇ ਕੋਣਾਂ ਵਿੱਚ ਘੁੰਮਣ ਦੀ ਆਗਿਆ ਦਿੰਦੇ ਹਨ, ਇਸ ਤਰ੍ਹਾਂ ਬਹੁ-ਦਿਸ਼ਾਵੀ ਗਤੀ ਨੂੰ ਸਮਰੱਥ ਬਣਾਉਂਦੇ ਹਨ।
ਜਿਵੇਂ ਹੀ ਸੈਂਟਰ ਸ਼ਾਫਟ ਘੁੰਮਦਾ ਹੈ, ਸਹਾਇਕ ਪਹੀਆਂ ਦੀ ਰੋਲਿੰਗ ਵਿਧੀ ਉਹਨਾਂ ਨੂੰ ਬਿਨਾਂ ਕਿਸੇ ਰੁਕਾਵਟ ਦੇ ਘੁੰਮਦੇ ਹੋਏ ਸੁਤੰਤਰ ਰੂਪ ਵਿੱਚ ਘੁੰਮਣ ਦੀ ਆਗਿਆ ਦਿੰਦੀ ਹੈ। ਹਰੇਕ ਸਹਾਇਕ ਪਹੀਏ ਦੇ ਘੁੰਮਣ ਦੀ ਗਤੀ ਅਤੇ ਦਿਸ਼ਾ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਕੇ, ਵਾਹਨ ਜਾਂ ਰੋਬੋਟ ਦੀ ਵੱਖ-ਵੱਖ ਦਿਸ਼ਾਵਾਂ ਵਿੱਚ ਗਤੀ ਨੂੰ ਮਹਿਸੂਸ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ।
ਕੁੱਲ ਮਿਲਾ ਕੇ, ਯੂਨੀਵਰਸਲ ਪਹੀਏ ਸਹਾਇਕ ਪਹੀਆਂ ਨੂੰ ਇੱਕ ਕੇਂਦਰੀ ਸ਼ਾਫਟ ਨਾਲ ਜੋੜ ਕੇ ਅਤੇ ਇੱਕ ਵਿਸ਼ੇਸ਼ ਰੋਲਿੰਗ ਵਿਧੀ ਅਤੇ ਰੋਟੇਸ਼ਨ ਵਿਧੀ ਦੀ ਵਰਤੋਂ ਕਰਕੇ ਕਈ ਦਿਸ਼ਾਵਾਂ ਵਿੱਚ ਜਾਣ ਦੀ ਸਮਰੱਥਾ ਨਾਲ ਬਣਾਏ ਗਏ ਹਨ ਜੋ ਸਹਾਇਕ ਪਹੀਆਂ ਨੂੰ ਕਈ ਦਿਸ਼ਾਵਾਂ ਵਿੱਚ ਸੁਤੰਤਰ ਰੂਪ ਵਿੱਚ ਘੁੰਮਣ ਅਤੇ ਘੁੰਮਣ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈ। ਇਹ ਵਾਹਨ ਜਾਂ ਰੋਬੋਟ ਨੂੰ ਇੱਕ ਛੋਟੀ ਜਿਹੀ ਜਗ੍ਹਾ ਵਿੱਚ ਘੁੰਮਣ ਅਤੇ ਸੁਤੰਤਰ ਰੂਪ ਵਿੱਚ ਘੁੰਮਣ ਦੀ ਆਗਿਆ ਦਿੰਦਾ ਹੈ, ਇਸਦੀ ਚਾਲ-ਚਲਣ ਅਤੇ ਲਚਕਤਾ ਵਿੱਚ ਸੁਧਾਰ ਕਰਦਾ ਹੈ।
ਪੋਸਟ ਸਮਾਂ: ਮਾਰਚ-12-2024